 048-295-1803
048-295-1803 048-295-1975
048-295-1975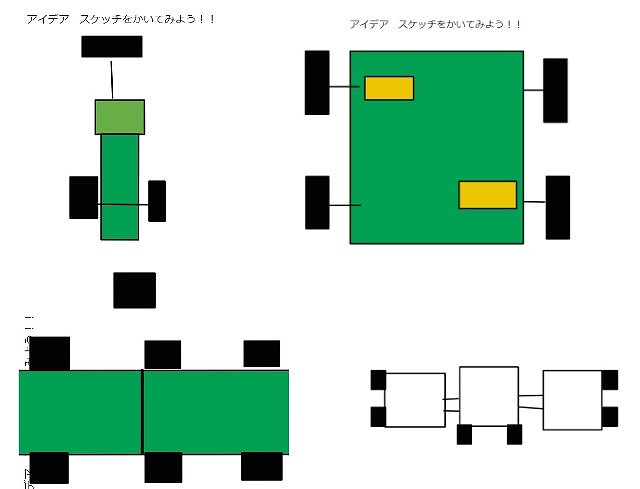
モーターカーを合体、改良してのレスキューロボット作りが4年生で始まりました。
レスキューロボットの条件は「前後左右」に動かすことです。

しかし理科で作ったモーターカーは前に進むだけです。電池を逆にすると電流の流れが逆に
なるのでモーターが逆回転して何とかバックさせることはできます。
いったい…どうやってモーターカーを使って前後左右に動かすのか?難問です。

教師「車はどうやって左右に動くのかな?」
子供「ハンドルを回すんだよ」
教師「ハンドル回すとどうして車が左右に動くようになるの」
子供「ハンドルを動かすとタイヤの向きが変わるの!」
教師「みんなの車はハンドルのしくみで左右に動かせるかな?」
子供「むりだなあ…」
教師「じゃあこのクレーン車の写真を見てみてください。このクレーン車はハン
ドルのしくみは使わないけど、左右に動く。どうなっているんだろう?」


子供たちにはなかなか難しい問題でした。何人かの子どもから方方のキャタピラ
を止めれば曲がるという意見が出ましたが、聞いていてもよくわからないようで
した。そこで車イスを用意して考えてみることにしました。

車イスはハンドルはありません。しかしちゃんと左右に曲がります。車イスはわかりやすかったようです。
方方の車を止めて、もう片方を回せば曲がります。

実際に車イスに乗って動いてもらいました。子供たちは「なるほど!」と感心して納得していました。

ルンバはお掃除ロボットです。このロボットも前後左右に動きます。
教師「ルンバはどうして前後左右に動くかわかりますか?裏の写真を見てみよう」
子供「あっ、わかった。わかった!」
教師「そうそう、クレーン車も車イスもルンバも見た目は違うけど、左右に動かすしくみ
はいっしょなんだね」

ロボットを左右に動かすには左右にタイヤを別々に動かすことが必要になります。だからモーター
は2つ必要なります。
教師「だから、みんなのモーターカーを合体して、2つのモーターを使い、タイヤを別々に動かして
レスキューロボットを作るんだよ」
この授業の後に、スクールタクトにアイデアスケッチを描いてもらいました。
