 048-295-1803
048-295-1803 048-295-1975
048-295-1975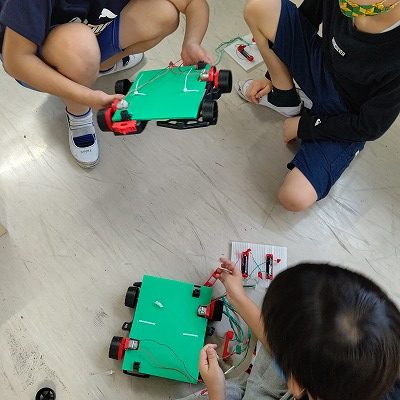
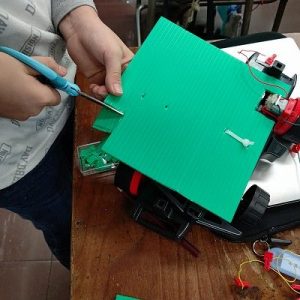
タブレットでスクールタクトを使って設計図を書き、ロボットの形
がだいたい決まったところで、ロボットの組み立てに入りました。

大胆にのこぎりで車体を切るグループも…

たてに車をつなぎます。しかし…左右独立にタイヤが回転しないと
曲がりません。だから片方のタイヤをはずしました。

確かにこれなら、曲がるかも知れません。

タイヤをはずして、車軸がはずれないように養生テープを巻いて
いきます。

この車は左右合体型になりそうです。プラダンを切り抜いて
モータ-が出るようにしました。上手に切っていますね。
左側もモーターが入るように切り込みました。

プラダンにコンパスの針で穴をあけて、結束バンドを通してしめ
て車体に固定していきます。
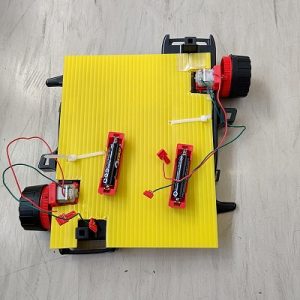
この車は左右合体型ですが、2輪型になっています。
電池ボックスを車の上において動かしてみました。
2つのモーターが同じ回転をすれば、前に進みます。電池の向き
を変えなくても、プラグを交換すればバックします。
片一方のモーターを止めれば、曲がります!
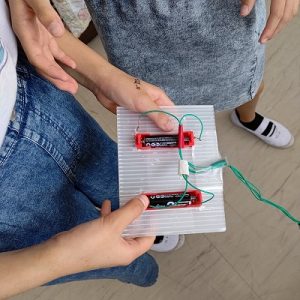
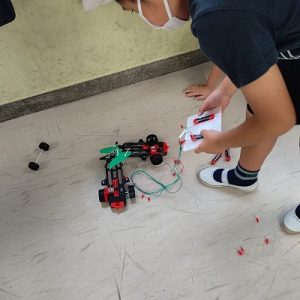
今回、簡易リモコン装置を作りました。電池ボックスを
モーターカーから1mぐらい離してビニル導線でつなぎ
ました。1個のモーターに1個の電池ボックスがつなが
っています。
車体の上にある2つの電池ボックスをつなぐ導線をのばして
リモコンにしたということです。
2つのもモーターを同じ方向に回転させれば、前に進みます。
電池ボックスのプラグを入れかえれば+-が逆になり、車は
バックします。そして片一方のプラグを抜けば、1個のモー
ターだけが止まり、曲がるというわけです。いろいろ試して
みました。

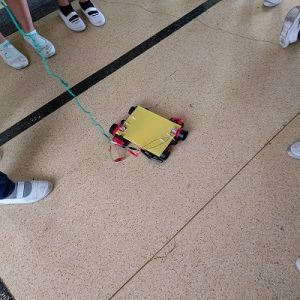
組み立てができたグループから簡易リモコンを使って動か
してみました。
この車はL型です。

この車は2輪型。後ろのモーターだけを回せば、前に進む
でしょうか?
見事、前には進みました。次に前のモーターが回れば、左右
に方向が変わるかどうか…やってみないとわかりません。次回
挑戦しましょう!
左右合体型4輪車でもやってみました。
前後左右に動くレスキューロボットが少しずつ形になってきました。
これから、どんどん改良を重ねていきます。どう仕上がるが楽しみ
ですね。